In the European EUREKA-project Prometheus (1987 – 1994), the system architecture developed with the BVV’s at UniBwM has been transferred to ‘Transputer’ systems (details on the system may be found in five contributions to the [International Symposium on ‘Intelligent Vehicles’, 1994 in Paris])
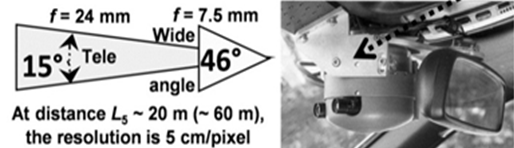 Bifocal vision to the front (in front of the rear view mirror, see left) and rear (hanging under the roof in the center of the rear window).
Bifocal vision to the front (in front of the rear view mirror, see left) and rear (hanging under the roof in the center of the rear window).
H.1.2a. Functional architecture
- Structured according to classes of objects and tasks;
- communication bandwidth such that full images could be transferred at video rate (lower bar left).
- More than five dozen processors of different types (16 to 32 bits) allowed realizing the architecture shown in the two figures:a) The upper one emphasizing the perceptual and behavioral tasks to be solved,

- b) the lower one shows details of the image sequence processing architecture on a ‚transputer network‘ (at 12.5 Hz, every second video frame).
H.1.2b. Realization on transputer network (adapted to BVV2 system architecture)
- Bifocal vision systems were installed for the front and the rear hemisphere (top left).
- Four links each to neighbors in a network;
- the dynamic data base separates the (lower) data-intensive image processing part from the (upper) cognitive part oriented according to physical objects.
- Data rates are reduced by 2 to 3 orders of magnitude; for physical objects, time histories may be stored for situation assessment (SA).
- The objects perceived were painted as overlays on the monitor screens for easy checking of image sequence understanding.
Video – TwofoldAutonLaneChangeParis 1994

References (in temporal order)
Behringer R (1994). Road Recognition from Multifocal Vision. In Masaki (ed.): Proc. of Int. Symp. on Intelligent Vehicles ’94, Paris, pp 302-307
Dickmanns ED, Behringer R, Dickmanns D, Hildebrandt T, Maurer M, Thomanek F, Schiehlen J (1994). The Seeing Passenger Car ‚VaMoRs-P‘. In Masaki (ed): Proc. of Int. Symp. on Intelligent Vehicles ’94, Paris, pp 68-73. pdf
v. Holt V (1994). Tracking and Classification of Overtaking Vehicles on Autobahnen. Int. Symp. on Intelligent Vehicles ’94, Paris, pp 314-319
Schiehlen J, Dickmanns ED (1994). A Camera Platform for Intelligent Vehicles. In Masaki (ed): Proc. of Int. Symp. on Intelligent Vehicles ’94, Paris, pp 393-398
Thomanek F, Dickmanns ED, Dickmanns D (1994). Multiple Object Recognition and Scene Interpretation for Autonomous Road Vehicle Guidance. In Masaki (ed): Proc. of Int. Symp. on Intelligent Vehicles ’94, Paris, Oct. 1994, 231-236. Abstract
Schiehlen J (1995). Kameraplattformen fuer aktiv sehende Fahrzeuge. Dissertation UniBwM / LRT. Also as Fortschrittsberichte VDI Verlag, Reihe 8, Nr. 514. Kurzfassg
Behringer R (1996). Visuelle Erkennung und Interpretation des Fahrspurverlaufes durch Rechnersehen für ein autonomes Straßenfahrzeug. Dissertation UniBwM / LRT; also: Fortschrittberichte VDI, Reihe 12, Nr. 310. Kurzfassg
Thomanek F (1996). Visuelle Erkennung und Zustandsschätzung von mehreren Straßenfahrzeugen zur autonomen Fahrzeugführung. Dissertation UniBwM / LRT; also as Fortschrittsberichte VDI Verlag, Reihe 12, Nr. 272. Kurzfassg
Dickmanns D (1997). Rahmensystem für visuelle Wahrnehmung veränderlicher Szenen durch Computer. Dissertation UniBwM / INF; also Shaker Verlag, Aachen, 1998. Zusammenfassg
v. Holt V (2004). Integrale Multisensorielle Fahrumgebungserfassung nach dem 4-D Ansatz. Dissertation UniBwM / LRT Kurzfassg