1986
First fully autonomous runs (lateral & longitudinal guidance by vision) Video ‘1987-1990 Early VaMoRs results_MyDiss.mp4’ (first part). Demo of these capabilities in skidpan of Daimler-Benz AG (DBAG) Stuttgart: (Vmax = 10 m/s = 36 km/h). [D4 Kurzfassung; 79, Section 7.3.3]
Video – 1986 VaMoRs in skidpan DBAG-Stuttgart
1987
Autonomous runs on free Autobahn: up to V = 96 km/h, [D4 Kurzfassung]
1988
Driving on roads of low order by night & rainfall; detection and stopping in front of large stationary obstacle from 40 km/h [D4, D5 Kurzfassg; 9, 14]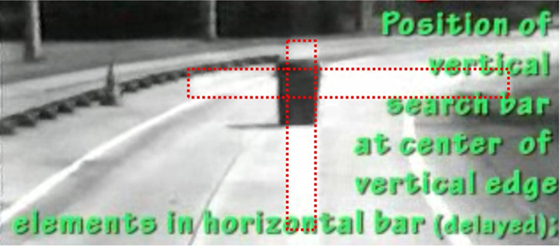
1989
Early results with VaMoRs including recognition of horizontal & vertical road curvature [D5 Kurzfassg, 16]
Video 09 – 1987-1990 Early VaMoRs results_MyDiss.mp4 (last part).
1990
Driving on unsealed roads at speeds up to 50 km/h [D5; D12 Kurzfassung];
turning off onto previously unknown cross roads [D19 Kurzfassung]
1992
Certification for driving fully autonomous in general public traffic on all types of roads (with at least three persons on board)
Phase VaMoRs b) Transition to ‚Transputers‘: 20 MHz clock rate, cycle time 80 ms,
1992
Duplicate on transputer-system the capabilities developed. Video 1992 VanCarTracking LaneChange Transputers
1993

1994
Bifocal saccadic perception of a traffic sign at 50 km/h [D16 Kurzfassg]
Video 1994 GazeControl TrafficSign Saccade.mp4 (final part).
Phase VaMoRs c) New Dual-Pentium_4 in COTS-system; clock rate around 700 MHz
1997
(trinocular/divergent) Stereo-range-estimation in near range [D24 Kurzfassung]
2001
Expectation-based, Multi-focal, Saccadic (EMS-) vision achieves first real-time demonstrations with flexibly integrated capabilities for performing complex missions [32 ext.abstract; 33a) pdf; to 33e), D29 Kurzfassung]. Video ‘2001 EMS-VaMoRs Trinoc. TurnLeft.mp4’
2003
2003
Same mission with stereo-vision on a single European-standard plug-in board into one of the PC